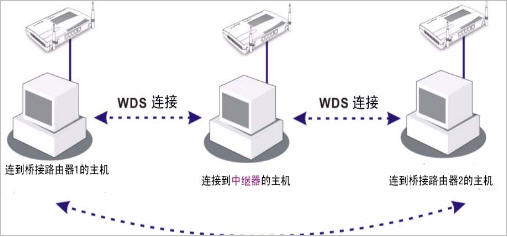
城市地下排污管中污水遍布,气味难闻,有毒气体含量高。常规设备如GPS、全站仪等无法进行使用,而且测绘人员无法在其中久待,如果采用物探设备勘测,因资料缺乏,排水沟的走势方向不清楚,探测精度不高,容易错测漏测,采用开挖方式成本很高。采用激光SLAM移动测量系统,可以解决地面物探设备探测精度不高,容易出错等问题,使用机器人边走边扫,移动灵活,适合封闭空间数据采集。利用无线WDS中继技术,可以把建图效果和视频图像实时传回后台管理人员的显示器上。有利于实时评估测量空间的特性,同时也可以操作机器人避免出现危险。
矿坑,洞穴这种大型非结构化空间下的地形测绘,GPS通常无法定位,地下空间中各种未知情况且十分危险,对野外作业人员来讲极具挑战性。新冠疫情危险区消毒或巡逻,开发基于5G技术的疫区消毒液喷洒车,可用于疫区消毒作业。
数字孪生战场地理环境是对真实战场地理环境的映射,是现代战争的新型实验场,是战场地理环境数字化的高级阶段,有助于实现战场态势感知与筹划能力的战略转型,它实际上描绘了一种综合运用大数据技术、人工智能技术、3R(虚拟现实 VR 、增强现实 AR 、混合现实 MR )技术、实景三维建模技术、感知控制技术、自然交互技术于一体的智能化战场地理环境。
系统可以搭载在无人机平台、无人车平台和背包平台上,可以快速对目标范围区域内的场景信息进行地形和建筑三维模型重建,并将点云实时解算后的模型数据远程传输到控制指挥中心,用于后台战场指挥和辅助决策。
SLAM 对于煤堆、矿堆、物料、粮仓体容盘点具有绝佳优势,基于激光扫描及SLAM定位技术,可以在棚内、室外环境进行快速移动式扫描作业,无需GPS,精度高、速度快、点云实时可见,独特的超低反射率物增程功能对煤堆、矿料等尤为有效,具有其他测量方式无可比拟的优势。